What Is V1, the Vector From Point O to Point E?
2 Vectors
2.2 Coordinate Systems and Components of a Vector
Learning Objectives
By the end of this section, you will be able to:
- Describe vectors in ii and iii dimensions in terms of their components, using unit of measurement vectors along the axes.
- Distinguish betwixt the vector components of a vector and the scalar components of a vector.
- Explicate how the magnitude of a vector is defined in terms of the components of a vector.
- Identify the management angle of a vector in a aeroplane.
- Explain the connectedness between polar coordinates and Cartesian coordinates in a plane.
Vectors are usually described in terms of their components in a coordinate system . Even in everyday life nosotros naturally invoke the concept of orthogonal projections in a rectangular coordinate system. For case, if y'all ask someone for directions to a particular location, yous will more likely exist told to go xl km east and thirty km n than l km in the management
![\[37\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-4f4dd609cde23dd8decbeb440bae0d2d_l3.png "Rendered by QuickLaTeX.com")
north of east.
In a rectangular (Cartesian) xy-coordinate system in a airplane, a point in a aeroplane is described by a pair of coordinates (ten, y). In a similar manner, a vector
![\[\overset{\to }{A}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-c256c0476e47b34e3df48375f38da000_l3.png "Rendered by QuickLaTeX.com")
in a aeroplane is described past a pair of its vector coordinates. The ten-coordinate of vector
is chosen its 10-component and the y-coordinate of vector
is called its y-component. The vector ten-component is a vector denoted by
![\[{\overset{\to }{A}}_{x}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-944d4e7e9bc7c91d1c22c49efd2ce7f9_l3.png "Rendered by QuickLaTeX.com")
. The vector y-component is a vector denoted by
![\[{\overset{\to }{A}}_{y}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-15675d75067a0b49ad78fbb04e2257a8_l3.png "Rendered by QuickLaTeX.com")
. In the Cartesian system, the x and y vector components of a vector are the orthogonal projections of this vector onto the x– and y-axes, respectively. In this way, following the parallelogram rule for vector addition, each vector on a Cartesian plane tin can be expressed as the vector sum of its vector components:
![\[\overset{\to }{A}={\overset{\to }{A}}_{x}+{\overset{\to }{A}}_{y}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-914f9b00e88bb64257faea3b8ccf8919_l3.png "Rendered by QuickLaTeX.com")
As illustrated in (Figure), vector
is the diagonal of the rectangle where the x-component
is the side parallel to the x-axis and the y-component
is the side parallel to the y-axis. Vector component
is orthogonal to vector component
.
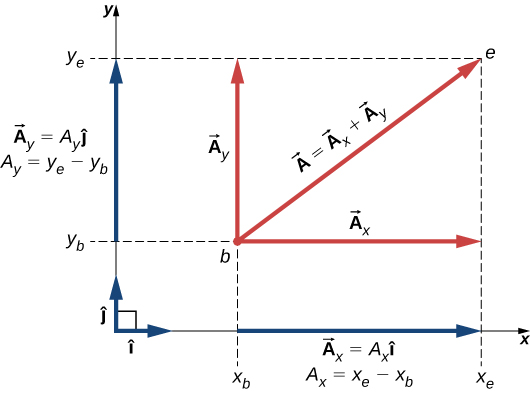
in a aeroplane in the Cartesian coordinate system is the vector sum of its vector x- and y-components. The x-vector component
is the orthogonal projection of vector
onto the x-axis. The y-vector component
is the orthogonal projection of vector
onto the y-axis. The numbers
![\[{A}_{x}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-909c1aaa4f055ad64eaf8839b04b4da7_l3.png "Rendered by QuickLaTeX.com")
and
![\[{A}_{y}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3e683b72f77ceea01c41dbd400ead086_l3.png "Rendered by QuickLaTeX.com")
that multiply the unit of measurement vectors are the scalar components of the vector.
It is customary to denote the positive direction on the 10-axis by the unit vector
![\[\hat{i}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-c32c0291ee203a5e905c75744ca790d3_l3.png "Rendered by QuickLaTeX.com")
and the positive direction on the y-axis by the unit vector
![\[\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-74a8ebf4112814621e7da1cf410d09d9_l3.png "Rendered by QuickLaTeX.com")
. Unit vectors of the axes,
and
, define two orthogonal directions in the plane. As shown in (Figure), the 10– and y– components of a vector can now be written in terms of the unit vectors of the axes:
![\[\{\begin{array}{c}{\overset{\to }{A}}_{x}={A}_{x}\hat{i}\\ {\overset{\to }{A}}_{y}={A}_{y}\hat{j}.\end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-69d82506ef9f3c64ae15271471d14c80_l3.png "Rendered by QuickLaTeX.com")
The vectors
and
defined by (Figure) are the vector components of vector
. The numbers
and
that define the vector components in (Figure) are the scalar components of vector
. Combining (Figure) with (Figure), we obtain the component class of a vector:
![\[\overset{\to }{A}={A}_{x}\hat{i}+{A}_{y}\hat{j}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-34f37161ac83a96197f8d10a9d6ba6ec_l3.png "Rendered by QuickLaTeX.com")
If we know the coordinates
![\[b({x}_{b},{y}_{b})\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ac7eac90649f3c6994634d49e83b7fec_l3.png "Rendered by QuickLaTeX.com")
of the origin indicate of a vector (where b stands for "beginning") and the coordinates
![\[e({x}_{e},{y}_{e})\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-932c7a7852506f6756deebc2c53c8622_l3.png "Rendered by QuickLaTeX.com")
of the finish signal of a vector (where e stands for "end"), we can obtain the scalar components of a vector but by subtracting the origin point coordinates from the end point coordinates:
![\[\{\begin{array}{c}{A}_{x}={x}_{e}-{x}_{b}\\ {A}_{y}={y}_{e}-{y}_{b}.\end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-4ce0ba2486c2cc1ee68d3eb052294596_l3.png "Rendered by QuickLaTeX.com")
Example
Displacement of a Mouse Pointer
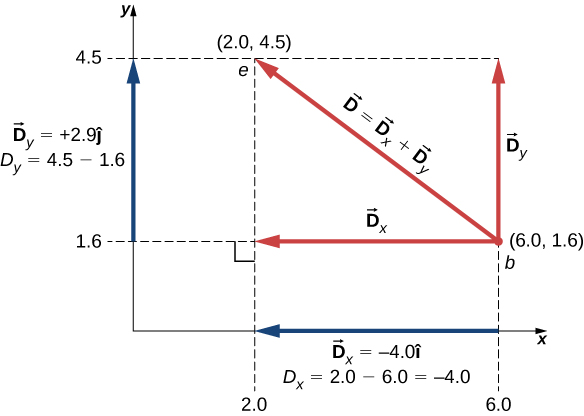
A mouse pointer on the brandish monitor of a reckoner at its initial position is at point (half-dozen.0 cm, 1.six cm) with respect to the lower left-side corner. If you move the pointer to an icon located at betoken (ii.0 cm, 4.5 cm), what is the deportation vector of the pointer?
Strategy
The origin of the xy-coordinate system is the lower left-side corner of the computer monitor. Therefore, the unit of measurement vector
on the ten-axis points horizontally to the correct and the unit vector
on the y-axis points vertically upward. The origin of the deportation vector is located at betoken b(6.0, ane.6) and the end of the deportation vector is located at point due east(ii.0, four.5). Substitute the coordinates of these points into (Figure) to observe the scalar components
![\[{D}_{x}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-8675bbc33286eae5d5545f8f7153bf5d_l3.png "Rendered by QuickLaTeX.com")
and
![\[{D}_{y}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-4e1039d7cf8d1b2bd4233e235c6240a7_l3.png "Rendered by QuickLaTeX.com")
of the displacement vector
![\[\overset{\to }{D}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-01d7df9c25a3cb1ca9ab7925d6694695_l3.png "Rendered by QuickLaTeX.com")
. Finally, substitute the coordinates into (Figure) to write the displacement vector in the vector component form.
Solution
[reveal-reply q="907005″]Bear witness Answer[/reveal-reply]
[hidden-answer a="907005″]We identify
![\[{x}_{b}=6.0\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3995e0ab643f42a307c443e0cbf2aa70_l3.png "Rendered by QuickLaTeX.com")
,
![\[{x}_{e}=2.0\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-86caef1bfc538b27f7d065f35a76eff4_l3.png "Rendered by QuickLaTeX.com")
,
![\[{y}_{b}=1.6\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-1068099510be13e69369f7b239ce3707_l3.png "Rendered by QuickLaTeX.com")
, and
![\[{y}_{e}=4.5\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-27240926ac686810761ad7f3f98463bd_l3.png "Rendered by QuickLaTeX.com")
, where the concrete unit of measurement is i cm. The scalar 10- and y-components of the displacement vector are
![\[\begin{array}{cc}\hfill {D}_{x}& ={x}_{e}-{x}_{b}=(2.0-6.0)\text{cm}=-4.0\,\text{cm},\hfill \\ \hfill {D}_{y}& ={y}_{e}-{y}_{b}=(4.5-1.6)\text{cm}=+2.9\,\text{cm}.\hfill \end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-bc9f8f5610094011f8d70ee1befaa82b_l3.png "Rendered by QuickLaTeX.com")
The vector component form of the displacement vector is
![\[\overset{\to }{D}={D}_{x}\hat{i}+{D}_{y}\hat{j}=(-4.0\,\text{cm})\hat{i}+(2.9\,\text{cm})\hat{j}=(-4.0\hat{i}+2.9\hat{j})\text{cm}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-09cf088775069fc88cdd27b8d489d56a_l3.png "Rendered by QuickLaTeX.com")
This solution is shown in (Figure ii.17).
[/hidden-answer]
Significance
Observe that the physical unit—here, ane cm—tin be placed either with each component immediately before the unit vector or globally for both components, every bit in (Figure). Often, the latter fashion is more user-friendly considering it is simpler.
The vector 10-component
![\[{\overset{\to }{D}}_{x}=-4.0\hat{i}=4.0(\text{−}\hat{i})\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-b822188ae8f62e3e5d1b15376af42562_l3.png "Rendered by QuickLaTeX.com")
of the deportation vector has the magnitude
![\[|{\overset{\to }{D}}_{x}|=|-4.0||\hat{i}|=4.0\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2df8916acc397af8f383854278388bd3_l3.png "Rendered by QuickLaTeX.com")
because the magnitude of the unit vector is
![\[|\hat{i}|=1\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-7ddd0493e8f3d0f6c9f3e05fb982504e_l3.png "Rendered by QuickLaTeX.com")
. Notice, too, that the management of the x-component is
![\[\text{−}\hat{i}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-7ca580451f18a3f60adbb9f1be52bd2d_l3.png "Rendered by QuickLaTeX.com")
, which is antiparallel to the direction of the +10-axis; hence, the x-component vector
![\[{\overset{\to }{D}}_{x}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-8cc5e4f322b44889299eb7e1d4d4c6a4_l3.png "Rendered by QuickLaTeX.com")
points to the left, every bit shown in (Figure). The scalar 10-component of vector
is
![\[{D}_{x}=-4.0\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-85fdb4f01f6295798b071e9bf5b90a52_l3.png "Rendered by QuickLaTeX.com")
.
Similarly, the vector y-component
![\[{\overset{\to }{D}}_{y}=+2.9\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-45ad1eb38e68b55626bc8ea211adf2ac_l3.png "Rendered by QuickLaTeX.com")
of the displacement vector has magnitude
![\[|{\overset{\to }{D}}_{y}|=|2.9||\hat{j}|=\,2.9\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-f043e1f8fbaa77205ee77ba4a6a326fe_l3.png "Rendered by QuickLaTeX.com")
because the magnitude of the unit vector is
![\[|\hat{j}|=1\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-9f74852e17d1ffbe125779b3478d497f_l3.png "Rendered by QuickLaTeX.com")
. The management of the y-component is
![\[+\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-a0a53330fbf35c677cae3b7fe9034681_l3.png "Rendered by QuickLaTeX.com")
, which is parallel to the management of the +y-centrality. Therefore, the y-component vector
![\[{\overset{\to }{D}}_{y}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-39e721c6cc69915f7502dce579ed0cdf_l3.png "Rendered by QuickLaTeX.com")
points upward, every bit seen in (Effigy). The scalar y-component of vector
is
![\[{D}_{y}=+2.9\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-219a6248ff7fea9d60452657f124f51c_l3.png "Rendered by QuickLaTeX.com")
. The displacement vector
is the resultant of its 2 vector components.
The vector component form of the displacement vector (Figure) tells us that the mouse pointer has been moved on the monitor four.0 cm to the left and two.9 cm upwards from its initial position.
Bank check Your Understanding
A blue fly lands on a sheet of graph newspaper at a signal located x.0 cm to the correct of its left edge and viii.0 cm higher up its bottom edge and walks slowly to a point located 5.0 cm from the left border and five.0 cm from the bottom edge. Choose the rectangular coordinate organisation with the origin at the lower left-side corner of the newspaper and discover the displacement vector of the fly. Illustrate your solution by graphing.
[reveal-answer q="fs-id1167132407980″]Show Solution[/reveal-answer]
[subconscious-answer a="fs-id1167132407980″]
![\[\overset{\to }{D}=(-5.0\hat{i}-3.0\hat{j})\text{cm}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-8b4a9b72138c81986d46dd5e95bda402_l3.png "Rendered by QuickLaTeX.com")
; the fly moved 5.0 cm to the left and iii.0 cm downwardly from its landing site.
[/hidden-answer]
When we know the scalar components
and
of a vector
, we can observe its magnitude A and its direction angle
![\[{\theta }_{A}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-73b16577f3c780380f8cfb050c56ae3d_l3.png "Rendered by QuickLaTeX.com")
. The direction bending—or direction, for short—is the angle the vector forms with the positive management on the ten-centrality. The angle
is measured in the counterclockwise management from the +x-axis to the vector ((Effigy)). Considering the lengths A,
, and
form a right triangle, they are related by the Pythagorean theorem:
![\[{A}^{2}={A}_{x}^{2}+{A}_{y}^{2}\enspace⇔\enspace{A}=\sqrt{{A}_{x}^{2}+{A}_{y}^{2}}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-12d8f477a812921aea24f7b4e33e84fa_l3.png "Rendered by QuickLaTeX.com")
This equation works even if the scalar components of a vector are negative. The direction angle
of a vector is defined via the tangent function of angle
in the triangle shown in (Figure):
![\[\text{tan}\,{\theta }_{A}=\frac{{A}_{y}}{{A}_{x}}\enspace⇒\enspace{\theta }_{A}={\text{tan}}^{-1}(\frac{{A}_{y}}{{A}_{x}}).\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-efe1960dde343b58145c70949bd591c3_l3.png "Rendered by QuickLaTeX.com")
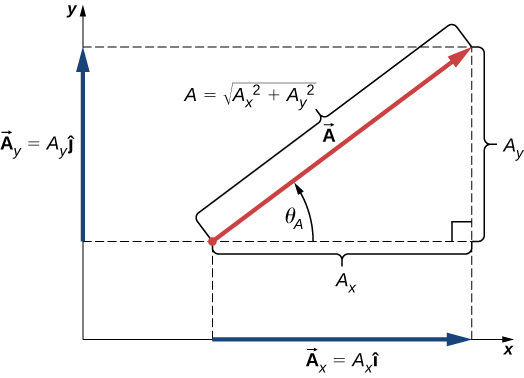
, its magnitude A and its direction angle
are related to the magnitudes of its scalar components considering A,
, and
form a right triangle.
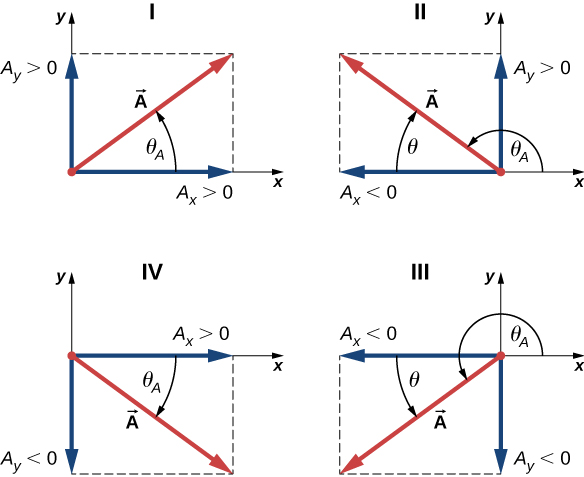
When the vector lies either in the first quadrant or in the fourth quadrant, where component
is positive ((Figure)), the bending
![\[\theta\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-4c29edd802429cf80b07b851f997cf63_l3.png "Rendered by QuickLaTeX.com")
in (Figure) is identical to the direction angle
. For vectors in the quaternary quadrant, angle
is negative, which means that for these vectors, direction bending
is measured clockwise from the positive 10-axis. Similarly, for vectors in the second quadrant, angle
is negative. When the vector lies in either the second or tertiary quadrant, where component
is negative, the direction bending is
![\[{\theta }_{A}=\theta +180\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-f01c2783578d9d4b089ccf3c904e276c_l3.png "Rendered by QuickLaTeX.com")
((Effigy)).
.
Example
Magnitude and Management of the Displacement VectorYou move a mouse pointer on the display monitor from its initial position at signal (half dozen.0 cm, one.6 cm) to an icon located at point (2.0 cm, 4.5 cm). What are the magnitude and direction of the displacement vector of the pointer?
Strategy
In (Effigy), nosotros found the deportation vector
of the mouse pointer (encounter (Figure)). Nosotros identify its scalar components
![\[{D}_{x}=-4.0\,\text{cm}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-a901425740800d602f42cbc49fcd0adc_l3.png "Rendered by QuickLaTeX.com")
and
![\[{D}_{y}=+2.9\,\text{cm}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-84f6797ef4f17178c8c873b0a9a3ca31_l3.png "Rendered by QuickLaTeX.com")
and substitute into (Figure) and (Effigy) to find the magnitude D and management
![\[{\theta }_{D}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-cc5994c1862e876419354bb482e876bf_l3.png "Rendered by QuickLaTeX.com")
, respectively.
Solution
[reveal-reply q="170894″]Show Answer[/reveal-answer]
[hidden-answer a="170894″]The magnitude of vector
is
![\[D=\sqrt{{D}_{x}^{2}+{D}_{y}^{2}}=\sqrt{{(-4.0\,\text{cm})}^{2}+{(2.9\,\text{cm})}^{2}}=\sqrt{{(4.0)}^{2}+{(2.9)}^{2}}\,\text{cm}=4.9\,\text{cm}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-83f930182dd8e9823b056a6ac386a3b0_l3.png "Rendered by QuickLaTeX.com")
The direction angle is
![\[\text{tan}\,\theta =\frac{{D}_{y}}{{D}_{x}}=\frac{+2.9\,\text{cm}}{-4.0\,\text{cm}}=-0.725\enspace⇒\enspace\theta ={\text{tan}}^{-1}(-0.725)=-35.9\text{°}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-aa71a532bea3e1eaa4c9aa906bbc4b80_l3.png "Rendered by QuickLaTeX.com")
Vector
lies in the 2d quadrant, so its direction angle is
![\[{\theta }_{D}=\theta +180\text{°}=-35.9\text{°}+180\text{°}=144.1\text{°}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-9f13b5605068b39c5466a0a9a2cbfdfc_l3.png "Rendered by QuickLaTeX.com")
[/hidden-answer]
Check Your Understanding
If the displacement vector of a blue fly walking on a sail of graph paper is
![\[\overset{\to }{D}=(-5.00\hat{i}-3.00\hat{j})\text{cm}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3ba0c6b14b2c71576f427a58a6a97a66_l3.png "Rendered by QuickLaTeX.com")
, find its magnitude and direction.
[reveal-answer q="fs-id1167132332238″]Show Solution[/reveal-answer]
[hidden-answer a="fs-id1167132332238″]
5.83 cm,
![\[211\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-190af2b28375e54b7d46daa97d60f5da_l3.png "Rendered by QuickLaTeX.com")
[/subconscious-answer]
In many applications, the magnitudes and directions of vector quantities are known and nosotros demand to find the resultant of many vectors. For example, imagine 400 cars moving on the Gold Gate Bridge in San Francisco in a strong wind. Each auto gives the span a different push in various directions and we would like to know how big the resultant push can maybe be. We have already gained some experience with the geometric structure of vector sums, so we know the task of finding the resultant by drawing the vectors and measuring their lengths and angles may go intractable pretty quickly, leading to huge errors. Worries similar this do not appear when we utilise analytical methods. The very first step in an belittling approach is to notice vector components when the management and magnitude of a vector are known.
Permit us return to the right triangle in (Figure). The quotient of the adjacent side
to the hypotenuse A is the cosine function of direction angle
,
![\[{A}_{x}\text{/}A=\text{cos}\,{\theta }_{A}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-f45aaea3ab8572c9fa9fb4d36bebc16e_l3.png "Rendered by QuickLaTeX.com")
, and the quotient of the opposite side
to the hypotenuse A is the sine function of
,
![\[{A}_{y}\text{/}A=\text{sin}\,{\theta }_{A}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-d194da01cd3a18607b96e37fd14ef915_l3.png "Rendered by QuickLaTeX.com")
. When magnitude A and direction
are known, we tin solve these relations for the scalar components:
![\[\{\begin{array}{c}{A}_{x}=A\,\text{cos}\,{\theta }_{A}\\ {A}_{y}=A\,\text{sin}\,{\theta }_{A}\end{array}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-9e4d0fee8dc24db8a91ad80c7b94f8cc_l3.png "Rendered by QuickLaTeX.com")
When computing vector components with (Effigy), care must be taken with the angle. The management angle
of a vector is the bending measured counterclockwise from the positive management on the x-axis to the vector. The clockwise measurement gives a negative bending.
Case
Components of Displacement Vectors
A rescue political party for a missing kid follows a search dog named Trooper. Trooper wanders a lot and makes many trial sniffs forth many different paths. Trooper somewhen finds the child and the story has a happy ending, but his displacements on various legs seem to be truly convoluted. On one of the legs he walks 200.0 m southeast, so he runs north some 300.0 k. On the 3rd leg, he examines the scents carefully for fifty.0 1000 in the direction
![\[30\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-c94934d8a2dddef67c8b7502e575de0e_l3.png "Rendered by QuickLaTeX.com")
due west of north. On the fourth leg, Trooper goes straight south for 80.0 grand, picks upwardly a fresh scent and turns
![\[23\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-0f93ba27be09d3647f9ad4cf67dfb097_l3.png "Rendered by QuickLaTeX.com")
west of southward for 150.0 one thousand. Observe the scalar components of Trooper's displacement vectors and his displacement vectors in vector component form for each leg.
Strategy
Let'south adopt a rectangular coordinate system with the positive x-centrality in the direction of geographic east, with the positive y-direction pointed to geographic north. Explicitly, the unit vector
of the x-axis points e and the unit vector
of the y-axis points north. Trooper makes five legs, then there are five displacement vectors. We outset by identifying their magnitudes and direction angles, so nosotros use (Effigy) to notice the scalar components of the displacements and (Figure) for the displacement vectors.
Solution
On the outset leg, the displacement magnitude is
![\[{L}_{1}=200.0\,\text{m}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2e217d88fd74b417882bb4c47b8043bd_l3.png "Rendered by QuickLaTeX.com")
and the management is southeast. For direction angle
![\[{\theta }_{1}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-636a7b368e0a82a57b98d3d600ecc5e0_l3.png "Rendered by QuickLaTeX.com")
we can accept either
![\[45\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-bf8dccd818bfd1a357bbfb4a87a029af_l3.png "Rendered by QuickLaTeX.com")
measured clockwise from the e direction or
![\[45\text{°}+270\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-18dbf45e7c8ae4b67c6598a4d060f11f_l3.png "Rendered by QuickLaTeX.com")
measured counterclockwise from the eastward management. With the first choice,
![\[{\theta }_{1}=-45\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-d0eb7a63a63acd97eff99b2b6071c3da_l3.png "Rendered by QuickLaTeX.com")
. With the 2d option,
![\[{\theta }_{1}=+315\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2236e7d56d4e677d7d5ff157479f68de_l3.png "Rendered by QuickLaTeX.com")
. We tin use either one of these two angles. The components are
![\[\begin{array}{l}{L}_{1x}={L}_{1}\,\text{cos}\,{\theta }_{1}=(200.0\,\text{m})\,\text{cos}\,315\text{°}=141.4\,\text{m,}\\ {L}_{1y}={L}_{1}\,\text{sin}\,{\theta }_{1}=(200.0\,\text{m})\,\text{sin}\,315\text{°}=-141.4\,\text{m}.\end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-70da13ee73c6e0c7ee5f0c567c9cef35_l3.png "Rendered by QuickLaTeX.com")
The displacement vector of the first leg is
![\[{\overset{\to }{L}}_{1}={L}_{1x}\hat{i}+{L}_{1y}\hat{j}=(141.4\hat{i}-141.4\hat{j})\,\text{m}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-cab64f339b7877b919f26c7332b5b846_l3.png "Rendered by QuickLaTeX.com")
On the second leg of Trooper'due south wanderings, the magnitude of the displacement is
![\[{L}_{2}=300.0\,\text{m}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-aeef1cbaba9e9b811996110d37f06040_l3.png "Rendered by QuickLaTeX.com")
and the direction is n. The direction angle is
![\[{\theta }_{2}=+90\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-b5ec43280ae18583045aaf4856b0976f_l3.png "Rendered by QuickLaTeX.com")
. We obtain the post-obit results:
![\[\begin{array}{ccc}\hfill {L}_{2x}& =\hfill & {L}_{2}\,\text{cos}\,{\theta }_{2}=(300.0\,\text{m})\,\text{cos}\,90\text{°}=0.0\,,\hfill \\ \hfill {L}_{2y}& =\hfill & {L}_{2}\,\text{sin}\,{\theta }_{2}=(300.0\,\text{m})\,\text{sin}\,90\text{°}=300.0\,\text{m,}\hfill \\ \hfill {\overset{\to }{L}}_{2}& =\hfill & {L}_{2x}\hat{i}+{L}_{2y}\hat{j}=(300.0\,\text{m})\hat{j}.\hfill \end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-94eadad111eddbbd759ad5212b565398_l3.png "Rendered by QuickLaTeX.com")
On the 3rd leg, the displacement magnitude is
![\[{L}_{3}=50.0\,\text{m}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-58bb48db0002f6f20fd5b7fd28e92f96_l3.png "Rendered by QuickLaTeX.com")
and the direction is
west of due north. The direction angle measured counterclockwise from the eastern direction is
![\[{\theta }_{3}=30\text{°}+90\text{°}=+120\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-1444358bf51aab03c623b0cf45adc17a_l3.png "Rendered by QuickLaTeX.com")
. This gives the post-obit answers:
![\[\begin{array}{ccc}\hfill {L}_{3x}& =\hfill & {L}_{3}\,\text{cos}\,{\theta }_{3}=(50.0\,\text{m})\,\text{cos}\,120\text{°}=-25.0\,\text{m,}\hfill \\ \hfill {L}_{3y}& =\hfill & {L}_{3}\,\text{sin}\,{\theta }_{3}=(50.0\,\text{m})\,\text{sin}\,120\text{°}=+43.3\,\text{m,}\hfill \\ \hfill {\overset{\to }{L}}_{3}& =\hfill & {L}_{3x}\hat{i}+{L}_{3y}\hat{j}=(-25.0\hat{i}+43.3\hat{j})\text{m}.\hfill \end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-d56754828dcfc911b71956563f94022c_l3.png "Rendered by QuickLaTeX.com")
On the fourth leg of the circuit, the displacement magnitude is
![\[{L}_{4}=80.0\,\text{m}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2af02ed84f1b0c0be882b1b6857af3f7_l3.png "Rendered by QuickLaTeX.com")
and the direction is south. The management angle tin be taken equally either
![\[{\theta }_{4}=-90\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-78ead8579264b3988facd37c8316f7a1_l3.png "Rendered by QuickLaTeX.com")
or
![\[{\theta }_{4}=+270\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-bc516b676f79137782f92206488135e6_l3.png "Rendered by QuickLaTeX.com")
. Nosotros obtain
![\[\begin{array}{ccc}\hfill {L}_{4x}& =\hfill & {L}_{4}\,\text{cos}\,{\theta }_{4}=(80.0\,\text{m})\,\text{cos}\,(-90\text{°})=0\,,\hfill \\ \hfill {L}_{4y}& =\hfill & {L}_{4}\,\text{sin}\,{\theta }_{4}=(80.0\,\text{m})\,\text{sin}\,(-90\text{°})=-80.0\,\text{m,}\hfill \\ \hfill {\overset{\to }{L}}_{4}& =\hfill & {L}_{4x}\hat{i}+{L}_{4y}\hat{j}=(-80.0\,\text{m})\hat{j}.\hfill \end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-75caaef0e624fccc5a3eebf6e361ad4e_l3.png "Rendered by QuickLaTeX.com")
[reveal-respond q="567672″]Testify Reply[/reveal-reply]
[hidden-answer a="567672″]On the terminal leg, the magnitude is
![\[{L}_{5}=150.0\,\text{m}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-8773c7527d88aed910b812d134a29a1d_l3.png "Rendered by QuickLaTeX.com")
and the bending is
![\[{\theta }_{5}=-23\text{°}+270\text{°}=+247\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-cad3e2039ec8593585cca52b630cfa8e_l3.png "Rendered by QuickLaTeX.com")
![\[(23\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-becf000d1cd178b0379605399be2cb0e_l3.png "Rendered by QuickLaTeX.com")
west of south), which gives
![\[\begin{array}{ccc}\hfill {L}_{5x}& =\hfill & {L}_{5}\,\text{cos}\,{\theta }_{5}=(150.0\,\text{m})\,\text{cos}\,247\text{°}=-58.6\,\text{m,}\hfill \\ \hfill {L}_{5y}& =\hfill & {L}_{5}\,\text{sin}\,{\theta }_{5}=(150.0\,\text{m})\,\text{sin}\,247\text{°}=-138.1\,\text{m,}\hfill \\ \hfill {\overset{\to }{L}}_{5}& =\hfill & {L}_{5x}\hat{i}+{L}_{5y}\hat{j}=(-58.6\hat{i}-138.1\hat{j})\text{m}.\hfill \end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-50b8574003f4f0376c1d9ebe22f3953d_l3.png "Rendered by QuickLaTeX.com")
[/hidden-answer]
Check Your Agreement
If Trooper runs 20 g west before taking a rest, what is his displacement vector?
[reveal-respond q="fs-id1167128919108″]Testify Solution[/reveal-answer]
[hidden-answer a="fs-id1167128919108″]
![\[\overset{\to }{D}=(-20\,\text{m})\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-bf4d0956cf30710e73ddfa56472d297d_l3.png "Rendered by QuickLaTeX.com")
[/hidden-answer]
Polar Coordinates
To depict locations of points or vectors in a plane, we need two orthogonal directions. In the Cartesian coordinate organisation these directions are given by unit of measurement vectors
and
along the ten-centrality and the y-axis, respectively. The Cartesian coordinate organisation is very convenient to use in describing displacements and velocities of objects and the forces acting on them. However, it becomes cumbersome when we need to describe the rotation of objects. When describing rotation, we usually work in the polar coordinate system.
In the polar coordinate system, the location of point P in a airplane is given by two polar coordinates ((Figure)). The first polar coordinate is the radial coordinate r, which is the altitude of signal P from the origin. The second polar coordinate is an angle
![\[\phi\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-56d9aee3b38ebdbfb319fbb130f7baa0_l3.png "Rendered by QuickLaTeX.com")
that the radial vector makes with some chosen direction, ordinarily the positive x-direction. In polar coordinates, angles are measured in radians, or rads. The radial vector is attached at the origin and points abroad from the origin to point P. This radial management is described by a unit radial vector
![\[\hat{r}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-1bfc976d3539141f50f1707dd2143686_l3.png "Rendered by QuickLaTeX.com")
. The 2nd unit vector
![\[\hat{t}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-465b5fe7663717498e750a6b08330899_l3.png "Rendered by QuickLaTeX.com")
is a vector orthogonal to the radial direction
. The positive
![\[+\hat{t}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-9df46bf7d830493243beccbfa4873c21_l3.png "Rendered by QuickLaTeX.com")
direction indicates how the bending
changes in the counterclockwise management. In this mode, a point P that has coordinates (x, y) in the rectangular system tin be described equivalently in the polar coordinate organization past the two polar coordinates
![\[(r,\phi )\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-7b4197298a3e972086e47d9fa8c94e4b_l3.png "Rendered by QuickLaTeX.com")
. (Figure) is valid for any vector, so we can apply it to express the x– and y-coordinates of vector
![\[\overset{\to }{r}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-40e96fcc2140b566b088042683f6bf29_l3.png "Rendered by QuickLaTeX.com")
. In this way, we obtain the connection between the polar coordinates and rectangular coordinates of point P:
![\[\{\begin{array}{c}x=r\,\text{cos}\,\phi \\ y=r\,\text{sin}\,\phi \end{array}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-7eb2c6920ea18a489480562acb7f03fa_l3.png "Rendered by QuickLaTeX.com")
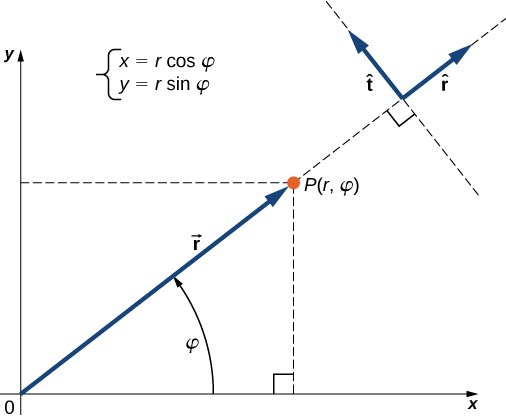
defines the positive direction along the radius r (radial management) and, orthogonal to it, the unit vector
defines the positive management of rotation by the angle
.
Case
Polar Coordinates
A treasure hunter finds ane argent coin at a location 20.0 m away from a dry out well in the direction
![\[20\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-8010c9581c5a70a3ecd4725a9efa2bbc_l3.png "Rendered by QuickLaTeX.com")
due north of eastward and finds i golden coin at a location ten.0 m away from the well in the direction
n of west. What are the polar and rectangular coordinates of these findings with respect to the well?
Strategy
The well marks the origin of the coordinate system and eastward is the +ten-management. We place radial distances from the locations to the origin, which are
![\[{r}_{S}=20.0\,\text{m}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-69eee91dcd79b0e6d3328acace90031f_l3.png "Rendered by QuickLaTeX.com")
(for the silver money) and
![\[{r}_{G}=10.0\,\text{m}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ddd5498c3b95ccc0cfbedc581ef23e2d_l3.png "Rendered by QuickLaTeX.com")
(for the gold coin). To find the angular coordinates, we convert
to radians:
![\[20\text{°}=\pi 20\text{/}180=\pi \text{/}9\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-7281c151e10be7d46565a4b68c9a89bd_l3.png "Rendered by QuickLaTeX.com")
. We employ (Figure) to find the x– and y-coordinates of the coins.
Solution
[reveal-answer q="8052″]Show Answer[/reveal-answer]
[hidden-respond a="8052″]The angular coordinate of the silver coin is
![\[{\phi }_{S}=\pi \text{/}9\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-91d39aa5d66d3b5e6c8b9812379c6d20_l3.png "Rendered by QuickLaTeX.com")
, whereas the angular coordinate of the gold coin is
![\[{\phi }_{G}=\pi -\pi \text{/}9=8\pi \text{/}9\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-0877116b2e7dee5a01cd0bf1e6505450_l3.png "Rendered by QuickLaTeX.com")
. Hence, the polar coordinates of the silverish money are
![\[({r}_{S},{\phi }_{S})=(20.0\,\text{m},\pi \text{/}9)\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-787c2cb0a05732d87c6b22c8970b8c79_l3.png "Rendered by QuickLaTeX.com")
and those of the gold coin are
![\[({r}_{G},{\phi }_{G})=(10.0\,\text{m},8\pi \text{/}9)\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ab2ba71da2695605814becc9ed7a397e_l3.png "Rendered by QuickLaTeX.com")
. We substitute these coordinates into (Figure) to obtain rectangular coordinates. For the aureate coin, the coordinates are
![\[\{\begin{array}{l}{x}_{G}={r}_{G}\,\text{cos}\,{\phi }_{G}=(10.0\,\text{m})\,\text{cos}\,8\pi \text{/}9=-9.4\,\text{m}\\ {y}_{G}={r}_{G}\,\text{sin}\,{\phi }_{G}=(10.0\,\text{m})\,\text{sin}\,8\pi \text{/}9=3.4\,\text{m}\end{array}\enspace⇒\enspace({x}_{G},{y}_{G})=(-9.4\,\text{m},3.4\,\text{m}).\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-85ba2db9dd23410049be19baa715ff35_l3.png "Rendered by QuickLaTeX.com")
For the silver coin, the coordinates are
![\[\{\begin{array}{l}{x}_{S}={r}_{S}\,\text{cos}\,{\phi }_{S}=(20.0\,\text{m})\,\text{cos}\,\pi \text{/}9=18.9\,\text{m}\\ {y}_{S}={r}_{S}\,\text{sin}\,{\phi }_{S}=(20.0\,\text{m})\,\text{sin}\,\pi \text{/}9=6.8\,\text{m}\end{array}\enspace⇒\enspace({x}_{S},{y}_{S})=(18.9\,\text{m},6.8\,\text{m}).\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-6118433d21734457796e916ac338b798_l3.png "Rendered by QuickLaTeX.com")
[/subconscious-answer]
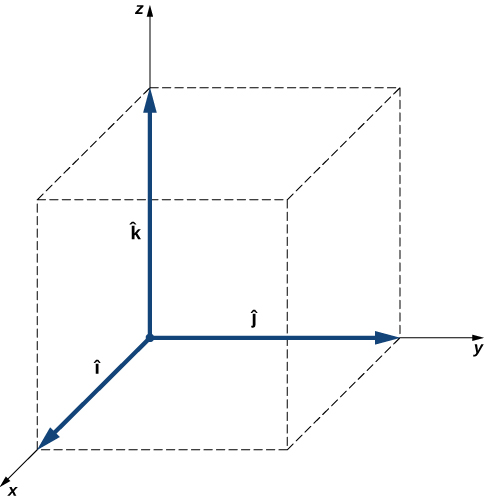
Vectors in 3 Dimensions
To specify the location of a point in infinite, we demand 3 coordinates (x, y, z), where coordinates x and y specify locations in a plane, and coordinate z gives a vertical position to a higher place or below the plane. Three-dimensional space has three orthogonal directions, so nosotros need non two just 3 unit vectors to define a 3-dimensional coordinate system. In the Cartesian coordinate organization, the outset two unit vectors are the unit vector of the 10-axis
and the unit vector of the y-centrality
. The third unit vector
![\[\hat{k}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-828b24280b1273458298b2376574cd96_l3.png "Rendered by QuickLaTeX.com")
is the direction of the z-axis ((Figure)). The order in which the axes are labeled, which is the order in which the three unit vectors appear, is important because it defines the orientation of the coordinate system. The order x–y–z, which is equivalent to the order
–
–
, defines the standard correct-handed coordinate system (positive orientation).
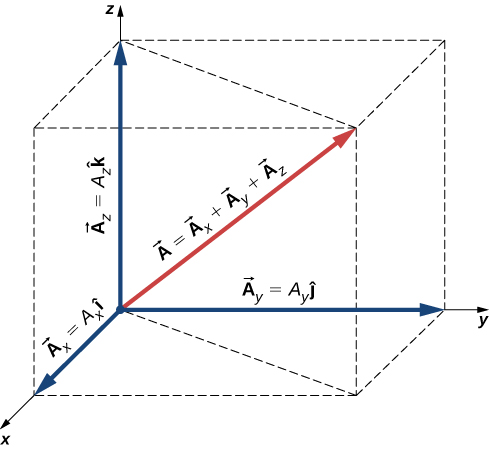
In three-dimensional space, vector
has three vector components: the x-component
![\[{\overset{\to }{A}}_{x}={A}_{x}\hat{i}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2360a19ab51e5aff8d040325a8383a2e_l3.png "Rendered by QuickLaTeX.com")
, which is the part of vector
forth the x-centrality; the y-component
![\[{\overset{\to }{A}}_{y}={A}_{y}\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-0cd2c91007f151700fb3ca76de45c726_l3.png "Rendered by QuickLaTeX.com")
, which is the role of
along the y-centrality; and the z-component
![\[{\overset{\to }{A}}_{z}={A}_{z}\hat{k}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-5f1314c7633f8413c7f5c50873cd29c4_l3.png "Rendered by QuickLaTeX.com")
, which is the part of the vector forth the z-centrality. A vector in three-dimensional space is the vector sum of its three vector components ((Figure)):
![\[\overset{\to }{A}={A}_{x}\hat{i}+{A}_{y}\hat{j}+{A}_{z}\hat{k}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-5214fdca9863a6aada6fe1a44d3d7113_l3.png "Rendered by QuickLaTeX.com")
If we know the coordinates of its origin
![\[b({x}_{b},{y}_{b},{z}_{b})\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3751ab3706f94a3641f9c98fa2b73918_l3.png "Rendered by QuickLaTeX.com")
and of its cease
![\[e({x}_{e},{y}_{e},{z}_{e})\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-fcd03a1c0634b8cf6284c8d52d0da82b_l3.png "Rendered by QuickLaTeX.com")
, its scalar components are obtained by taking their differences:
and
are given by (Figure) and the z-component is given past
![\[{A}_{z}={z}_{e}-{z}_{b}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-9393c70781ce8881c6c7f712bcda0d01_l3.png "Rendered by QuickLaTeX.com")
Magnitude A is obtained past generalizing (Effigy) to three dimensions:
![\[A=\sqrt{{A}_{x}^{2}+{A}_{y}^{2}+{A}_{z}^{2}}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-da85ce462426a611f547ec97f3f35082_l3.png "Rendered by QuickLaTeX.com")
This expression for the vector magnitude comes from applying the Pythagorean theorem twice. As seen in (Figure), the diagonal in the xy-aeroplane has length
![\[\sqrt{{A}_{x}^{2}+{A}_{y}^{2}}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-f99ce721ed7f8b139ef30a30ee9cf9d4_l3.png "Rendered by QuickLaTeX.com")
and its foursquare adds to the square
![\[{A}_{z}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-f85f50a9175f9250ad6d851e06d0f22d_l3.png "Rendered by QuickLaTeX.com")
to give
![\[{A}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-719d7046b0c15a131ecf313d3fa8743d_l3.png "Rendered by QuickLaTeX.com")
. Annotation that when the z-component is zero, the vector lies entirely in the xy-plane and its description is reduced to two dimensions.
Instance
Takeoff of a Drone
During a takeoff of IAI Heron ((Figure)), its position with respect to a control tower is 100 1000 above the ground, 300 m to the east, and 200 grand to the north. One infinitesimal later, its position is 250 m above the basis, 1200 m to the east, and 2100 m to the north. What is the drone'southward displacement vector with respect to the control belfry? What is the magnitude of its displacement vector?

Strategy
We take the origin of the Cartesian coordinate system as the command tower. The management of the +ten-axis is given by unit vector
to the east, the management of the +y-axis is given past unit vector
to the north, and the direction of the +z-axis is given past unit vector
, which points up from the basis. The drone's beginning position is the origin (or, equivalently, the beginning) of the displacement vector and its second position is the end of the displacement vector.
Solution
[reveal-answer q="436377″]Prove Answer[/reveal-answer]
[subconscious-answer a="436377″]Nosotros identify b(300.0 m, 200.0 m, 100.0 m) and e(480.0 1000, 370.0 yard, 250.0m), and use (Figure) and (Effigy) to find the scalar components of the drone'southward displacement vector:
![\[\{\begin{array}{l}{D}_{x}={x}_{e}-{x}_{b}=1200.0\,\text{m}-300.0\,\text{m}=900.0\,\text{m},\\ {D}_{y}={y}_{e}-{y}_{b}=2100.0\,\text{m}-200.0\,\text{m}=1900.0\,\text{m,}\\ {D}_{z}={z}_{e}-{z}_{b}=250.0\,\text{m}-100.0\,\text{m}=150.0\,\text{m}.\end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-144c14cc49963f201e51cd86ea1e0cf8_l3.png "Rendered by QuickLaTeX.com")
We substitute these components into (Figure) to find the displacement vector:
![\[\overset{\to }{D}={D}_{x}\hat{i}+{D}_{y}\hat{j}+{D}_{z}\hat{k}=900.0\,\text{m}\hat{i}+1900.0\,\text{m}\hat{j}+150.0\,\text{m}\hat{k}=(0.90\hat{i}+1.90\hat{j}+0.15\hat{k})\,\text{km}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-404d81cd32e70f533df5d1323bc761c0_l3.png "Rendered by QuickLaTeX.com")
We substitute into (Effigy) to discover the magnitude of the displacement:
![\[D=\sqrt{{D}_{x}^{2}+{D}_{y}^{2}+{D}_{z}^{2}}=\sqrt{{(0.90\,\text{km})}^{2}+{(1.90\,\text{km})}^{2}+{(0.15\,\text{km})}^{2}}=4.44\,\text{km}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-9087fddd732a83c3e00666a7bf904fd0_l3.png "Rendered by QuickLaTeX.com")
[/hidden-respond]
Check Your Understanding
If the average velocity vector of the drone in the deportation in (Figure) is
![\[\overset{\to }{u}=(15.0\hat{i}+31.7\hat{j}+2.5\hat{k})\text{m}\text{/}\text{s}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ff7afc87666cf9fe6743e59c4d3decb9_l3.png "Rendered by QuickLaTeX.com")
, what is the magnitude of the drone's velocity vector?
[reveal-reply q="fs-id1167132346740″]Bear witness Solution[/reveal-answer]
[hidden-answer a="fs-id1167132346740″]
35.1 m/s = 126.four km/h
[/subconscious-answer]
Summary
- Vectors are described in terms of their components in a coordinate system. In ii dimensions (in a aeroplane), vectors have 2 components. In three dimensions (in infinite), vectors accept three components.
- A vector component of a vector is its part in an centrality management. The vector component is the product of the unit vector of an axis with its scalar component along this axis. A vector is the resultant of its vector components.
- Scalar components of a vector are differences of coordinates, where coordinates of the origin are subtracted from terminate point coordinates of a vector. In a rectangular system, the magnitude of a vector is the square root of the sum of the squares of its components.
- In a plane, the management of a vector is given by an bending the vector has with the positive x-axis. This direction angle is measured counterclockwise. The scalar x-component of a vector can exist expressed equally the product of its magnitude with the cosine of its management angle, and the scalar y-component tin can be expressed as the product of its magnitude with the sine of its management angle.
- In a airplane, there are two equivalent coordinate systems. The Cartesian coordinate organization is divers by unit vectors
and
along the x-axis and the y-axis, respectively. The polar coordinate system is defined by the radial unit of measurement vector
, which gives the direction from the origin, and a unit vector
, which is perpendicular (orthogonal) to the radial direction.
Conceptual Questions
Give an example of a nonzero vector that has a component of zilch.
[reveal-respond q="fs-id1167132706218″]Show Solution[/reveal-answer]
[hidden-reply a="fs-id1167132706218″]
a unit vector of the x-axis
[/hidden-answer]
Explain why a vector cannot have a component greater than its own magnitude.
If ii vectors are equal, what can you say about their components?
[reveal-answer q="fs-id1167133715718″]Bear witness Solution[/reveal-answer]
[hidden-answer a="fs-id1167133715718″]
They are equal.
[/hidden-answer]
If vectors
and
![\[\overset{\to }{B}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-16132e95c626e69906b36bbc54b9df99_l3.png "Rendered by QuickLaTeX.com")
are orthogonal, what is the component of
along the direction of
? What is the component of
along the direction of
?
If 1 of the two components of a vector is non nothing, can the magnitude of the other vector component of this vector be zero?
[reveal-respond q="fs-id1167133568374″]Prove Solution[/reveal-respond]
[hidden-answer a="fs-id1167133568374″]
yes
[/subconscious-answer]
If 2 vectors have the aforementioned magnitude, do their components have to be the same?
Issues
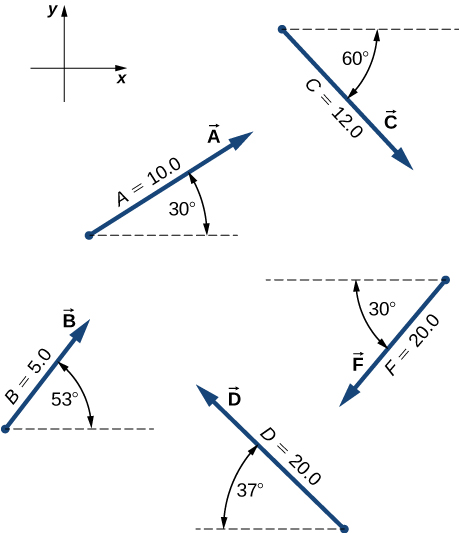
Bold the +x-axis is horizontal and points to the correct, resolve the vectors given in the post-obit effigy to their scalar components and limited them in vector component form.
[reveal-answer q="fs-id1167132683339″]Testify Solution[/reveal-answer]
[hidden-reply a="fs-id1167132683339″]
a.
![\[\overset{\to }{A}=+8.66\hat{i}+5.00\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-60c347180dd303ad51f6d2eb56430d74_l3.png "Rendered by QuickLaTeX.com")
, b.
![\[\overset{\to }{B}=+30.09\hat{i}+39.93\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3cac65b564fa7543c0fb690fe1825da5_l3.png "Rendered by QuickLaTeX.com")
, c.
![\[\overset{\to }{C}=+6.00\hat{i}-10.39\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-f910da30c1c0359a00cb4d2945d60d8f_l3.png "Rendered by QuickLaTeX.com")
, d.
![\[\overset{\to }{D}=-15.97\hat{i}+12.04\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3d1cb89547b636f59a7853e0464f3215_l3.png "Rendered by QuickLaTeX.com")
, f.
![\[\overset{\to }{F}=-17.32\hat{i}-10.00\hat{j}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2a32e28ccc67d02016056c23e9dd088d_l3.png "Rendered by QuickLaTeX.com")
[/subconscious-answer]
Suppose you walk xviii.0 k direct west and so 25.0 grand straight n. How far are yous from your starting point? What is your displacement vector? What is the direction of your deportation? Assume the +x-axis is horizontal to the right.
You lot drive 7.50 km in a straight line in a direction
![\[15\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-686e4b605859d432637193f03a3ee2f7_l3.png "Rendered by QuickLaTeX.com")
east of north. (a) Detect the distances you would have to bulldoze straight east and and then directly north to make it at the same point. (b) Bear witness that you still arrive at the same point if the east and north legs are reversed in order. Assume the +10-axis is to the east.
[reveal-reply q="fs-id1167133521610″]Show Solution[/reveal-respond]
[hidden-answer a="fs-id1167133521610″]
a. 1.94 km, 7.24 km; b. proof
[/subconscious-answer]
A sledge is being pulled by two horses on a flat terrain. The net force on the sledge tin can be expressed in the Cartesian coordinate arrangement as vector
![\[\overset{\to }{F}=(-2980.0\hat{i}+8200.0\hat{j})\text{N}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2c828d9f95c698f5603f7187d43a1a6e_l3.png "Rendered by QuickLaTeX.com")
, where
and
denote directions to the east and north, respectively. Find the magnitude and management of the pull.
A trapper walks a 5.0-km direct-line distance from her cabin to the lake, as shown in the following figure. Determine the eastward and north components of her deportation vector. How many more kilometers would she have to walk if she walked along the component displacements? What is her displacement vector?
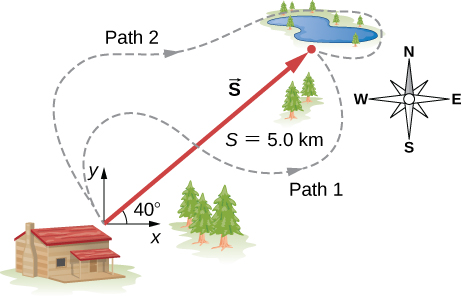
3.8 km east, 3.2 km north, 2.0 km,
![\[\overset{\to }{D}=(3.8\hat{i}+3.2\hat{j})\text{km}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-edca41b83d72ad67b15fe61780f57ea1_l3.png "Rendered by QuickLaTeX.com")
The polar coordinates of a betoken are
![\[4\pi \text{/}3\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-210471d42dcaa3abfe353a9170a8a4a4_l3.png "Rendered by QuickLaTeX.com")
and 5.fifty m. What are its Cartesian coordinates?
Ii points in a plane have polar coordinates
![\[{P}_{1}(2.500\,\text{m},\pi \text{/}6)\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3753bd466e238be192e7c2f85a2616d4_l3.png "Rendered by QuickLaTeX.com")
and
![\[{P}_{2}(3.800\,\text{m},2\pi \text{/}3)\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3ab88e5e459735d7305bc1edbabddc55_l3.png "Rendered by QuickLaTeX.com")
. Decide their Cartesian coordinates and the distance betwixt them in the Cartesian coordinate organisation. Round the distance to a nearest centimeter.
[reveal-answer q="fs-id1167132579170″]Show Solution[/reveal-answer]
[hidden-reply a="fs-id1167132579170″]
![\[{P}_{1}(2.165\,\text{m},1.250\,\text{m})\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-e9b95c1e3fee891b12caccb100e42810_l3.png "Rendered by QuickLaTeX.com")
,
![\[{P}_{2}(-1.900\,\text{m},3.290\,\text{m})\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-21ed414954fdb6e2bf02d56688495f66_l3.png "Rendered by QuickLaTeX.com")
, 5.27 m
[/hidden-answer]
A chameleon is resting quietly on a lanai screen, waiting for an insect to come up past. Assume the origin of a Cartesian coordinate organisation at the lower left-hand corner of the screen and the horizontal management to the correct as the +x-direction. If its coordinates are (2.000 m, i.000 m), (a) how far is it from the corner of the screen? (b) What is its location in polar coordinates?
Ii points in the Cartesian plane are A(2.00 m, −4.00 m) and B(−iii.00 k, 3.00 m). Observe the distance between them and their polar coordinates.
[reveal-respond q="fs-id1167132372708″]Show Solution[/reveal-answer]
[hidden-answer a="fs-id1167132372708″]
8.lx m,
![\[A(2\sqrt{5}\,\text{m},0.647\pi )\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-cbc43d16c70b9c671c4b57e657901e6c_l3.png "Rendered by QuickLaTeX.com")
,
![\[B(3\sqrt{2}\,\text{m},0.75\pi )\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-a7216537eb522b571310c4ae5ebb1a59_l3.png "Rendered by QuickLaTeX.com")
[/hidden-reply]
A fly enters through an open up window and zooms around the room. In a Cartesian coordinate system with three axes along three edges of the room, the fly changes its position from point b(4.0 chiliad, one.5 m, 2.5 m) to betoken e(ane.0 m, four.5 m, 0.five yard). Find the scalar components of the fly's deportation vector and express its deportation vector in vector component course. What is its magnitude?
Glossary
- component class of a vector
- a vector written as the vector sum of its components in terms of unit vectors
- direction bending
- in a airplane, an angle between the positive direction of the x-centrality and the vector, measured counterclockwise from the axis to the vector
- polar coordinate system
- an orthogonal coordinate system where location in a plane is given by polar coordinates
- polar coordinates
- a radial coordinate and an bending
- radial coordinate
- distance to the origin in a polar coordinate organisation
- scalar component
- a number that multiplies a unit vector in a vector component of a vector
- unit vectors of the axes
- unit vectors that define orthogonal directions in a aeroplane or in infinite
- vector components
- orthogonal components of a vector; a vector is the vector sum of its vector components.
Source: https://opentextbc.ca/universityphysicsv1openstax/chapter/2-2-coordinate-systems-and-components-of-a-vector/
0 Response to "What Is V1, the Vector From Point O to Point E?"
Postar um comentário